ПРОТОТИП РОБОТА с новым способом передвижения
 |
|  |
| 
| Статьи и публикации |
 Прототип «прыгающего» робота, который будет перемещаться методом подскока, создают американские студенты и инженеры.
Прототип «прыгающего» робота, который будет перемещаться методом подскока, создают американские студенты и инженеры.
Беспилотные аппараты на колесах успешно исследуют поверхность Луны и Марса, но их свобода передвижения существенно ограничена – они не могут быстро преодолеть большие расстояния или проникнуть в наиболее интересные места - внутрь кратеров, на вершины скал.
Ученые вынуждены высаживать аппараты на безопасные равнины, которые вряд ли богаты сенсационными открытиями. Это то же самое, что искать редкие виды животных посреди шоссе только потому, что малолитражка не может проехать вглубь джунглей.
Более двух лет группа студентов из MIT под руководством профессора практической космонавтики, бывшего астронавта NASA Джеффри Хоффмана (Jeffrey Hoffman) и в сотрудничестве с инженерами из Draper Laboratory заняты разработкой нового типа робота, который сможет перемещаться по поверхности планеты методом «подскока». В военной авиации используется принцип перелета с короткой посадкой в промежуточном пункте. Подскок позволит беспилотному аппарату преодолевать большие расстояния и проникать в труднодоступные места и, таким образом, собрать больше научной информации.
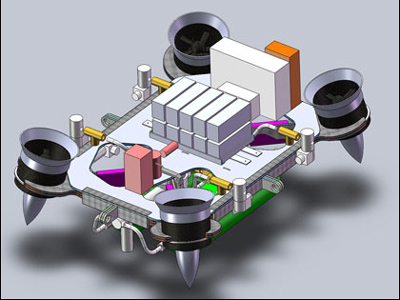
Американские студенты и инженеры создают прототип такого беспилотного робота под названием Talaris. Это платформа метровой ширины и весом около 50 кг – уменьшенный вариант будущих транспортных платформ для исследования других планет. В ближайшее время планируется начать испытания программного обеспечения для автоматических систем навигации и управления беспилотного аппарата.
Основная двигательная установка Talaris - четыре винта в кольцевом обтекателе, которые обеспечивают подъемную силу беспилотному роботу и моделируют силу тяжести различных планет. Винты вращаются со скоростью 24000 оборота в минуту электромоторами Aero-Naut TF8000 тягой по 120 ньютонов каждый. Источник питания – 4 батареи по 12В и одна 6В.
Дополнительная двигательная установка беспилотного аппарата использует сжатый азот для маневрирования и оценки поведения платформы в моделируемых условиях гравитации. С ее помощью можно протестировать различные алгоритмы навигации для идеальной настройки программного обеспечения. Именно способность проверить функционирование «подскока» перед отправкой в космос отличает Talaris от многочисленных прототипов исследовательских зондов.
Аппараты, похожие на Talaris, могут использоваться для изучения любого объекта в Солнечной системе, в том числе астероидов. Видимо, планируется использовать различные типы двигателей - вентиляторы для небесных тел с атмосферой или реактивные двигатели для вакуума. Летающие беспилотные платформы смогут изучить глубокие кратеры на Луне, измерить магнетизм отвесных скал, установить сеть сейсмометров и выполнить множество других, недоступных современным аппаратам операций.
Не менее важна способность «прыгающих» роботов преодолевать большие расстояния. Например, марсоход Spirit за шесть лет преодолел около 8 км, а аналог Talaris сможет путешествовать на сотни километров в зависимости от размера платформы.
У «прыгающих» роботов есть серьезный недостаток - их мощные двигатели требуют топлива, в отличие от колесных роботов, которые могут обойтись солнечными батареями. Это ограничивает количество прыжков, но инженеры утверждают, что прыгающие платформы останутся полезными и после выработки топлива. Они могут продолжить движение на колесах, превратиться в стационарные научные платформы или даже изготовить топливо из местных материалов.
В настоящее время команда разработчиков Talaris заканчивает доводку прототипа и надеется завершить испытания до конца года, чтобы выиграть главный приз конкурса Google Lunar X Prize – отправку своего аппарата на Луну.
Прыгающие аналоги
Принцип передвижения «подскоком» уже не нов.
Подобная схема движения широко используется в военных беспилотных аппаратах.
Например, беспилотный летательный аппарат T-Hawk с одним вентиляторным двигателем активно применяется для обнаружения самодельных бомб.
Он отличается простотой устройства, надежностью и небольшим размером.